
ロボットが走り回る時代の技術を探る
理工学科
機械・自動車・航空・AIロボット系
鹿内佳人 准教授
機械・自動車・航空・AIロボット系
鹿内佳人 准教授
ロボットが家の中を当たり前のように動き回る時代になりました。代表例はロボット掃除機です。
家電製品に分類され、今や1万円以下の製品もあるロボット掃除機ですが、その技術は侮れません。注目技術の一つは、壁やテレビ台などの位置を探って、部屋の地図(レイアウト図)を作る機能です(※1)。当初は一部の上位機だけの機能でしたが、今では2万円台の製品にも搭載されています。地図があると無駄のない走行ルートが描けるので、掃除効率は格段にアップします。
※1 マッピング機能:ロボット掃除機に限らず、機能の高い自走ロボットでは地図を作り、同時に自分の位置を推定する技術を搭載している。これはSLAM(Simultaneous Localization and Mapping:自己位置の推定と環境地図作成を同時に行う)技術と呼ばれていて、レーザーを使って障害物までの距離を測るセンサー「LiDAR(Light Detection and Ranging)」を含む各種センサーからのデータ、および自走した距離などを基に演算して求める
自走ロボットが動き回る場所は家庭にとどまりません。すでに病院では搬送ロボットがシーツや食事、薬品を運び、オフィスではプリンターが座席まで書類を届け、工場では機械部品を運ぶロボットが走り回り始めました。利用の場は広がっています。
自走ロボットの導入は、この先さらに加速するでしょう。では未来の自走ロボットに求められる機能は何でしょうか。レイアウト変更が頻繁にある工場では、環境変化にすばやく対応できる適応力が求められるかもしれません。一方、場所によっては複数のロボットが導入され、動き回るロボットだらけになるでしょう。そんな環境では、ロボット同士の衝突を回避して、しかも効率的に動き回る機能が求められるのかもしれません。機械工学科の鹿内佳人准教授は、そうした未来の自走ロボットに求められる機能を探り、必要な技術について研究しています。
家電製品に分類され、今や1万円以下の製品もあるロボット掃除機ですが、その技術は侮れません。注目技術の一つは、壁やテレビ台などの位置を探って、部屋の地図(レイアウト図)を作る機能です(※1)。当初は一部の上位機だけの機能でしたが、今では2万円台の製品にも搭載されています。地図があると無駄のない走行ルートが描けるので、掃除効率は格段にアップします。
※1 マッピング機能:ロボット掃除機に限らず、機能の高い自走ロボットでは地図を作り、同時に自分の位置を推定する技術を搭載している。これはSLAM(Simultaneous Localization and Mapping:自己位置の推定と環境地図作成を同時に行う)技術と呼ばれていて、レーザーを使って障害物までの距離を測るセンサー「LiDAR(Light Detection and Ranging)」を含む各種センサーからのデータ、および自走した距離などを基に演算して求める
自走ロボットが動き回る場所は家庭にとどまりません。すでに病院では搬送ロボットがシーツや食事、薬品を運び、オフィスではプリンターが座席まで書類を届け、工場では機械部品を運ぶロボットが走り回り始めました。利用の場は広がっています。
自走ロボットの導入は、この先さらに加速するでしょう。では未来の自走ロボットに求められる機能は何でしょうか。レイアウト変更が頻繁にある工場では、環境変化にすばやく対応できる適応力が求められるかもしれません。一方、場所によっては複数のロボットが導入され、動き回るロボットだらけになるでしょう。そんな環境では、ロボット同士の衝突を回避して、しかも効率的に動き回る機能が求められるのかもしれません。機械工学科の鹿内佳人准教授は、そうした未来の自走ロボットに求められる機能を探り、必要な技術について研究しています。
課題には情報や電気の知識も総動員して当たる
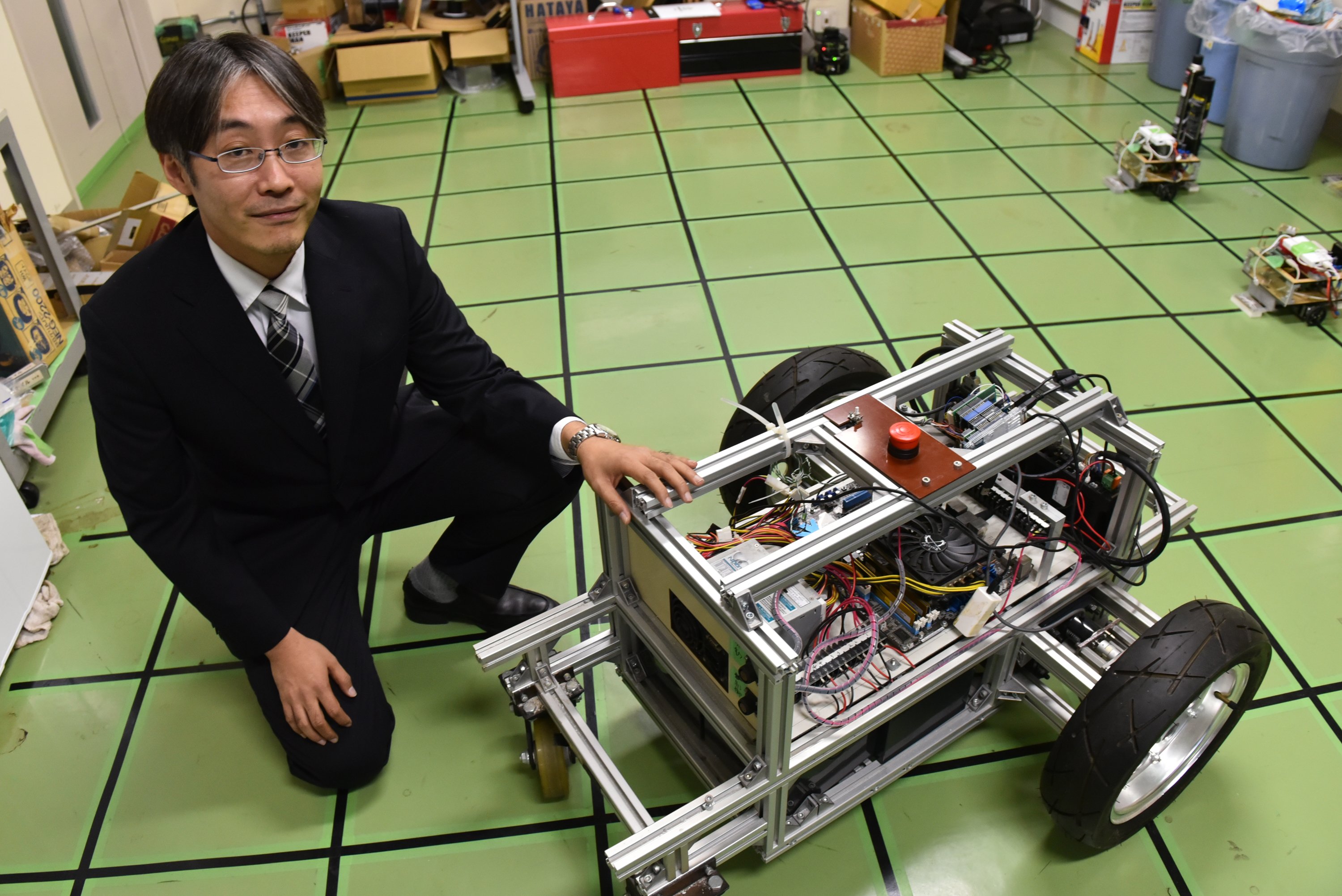
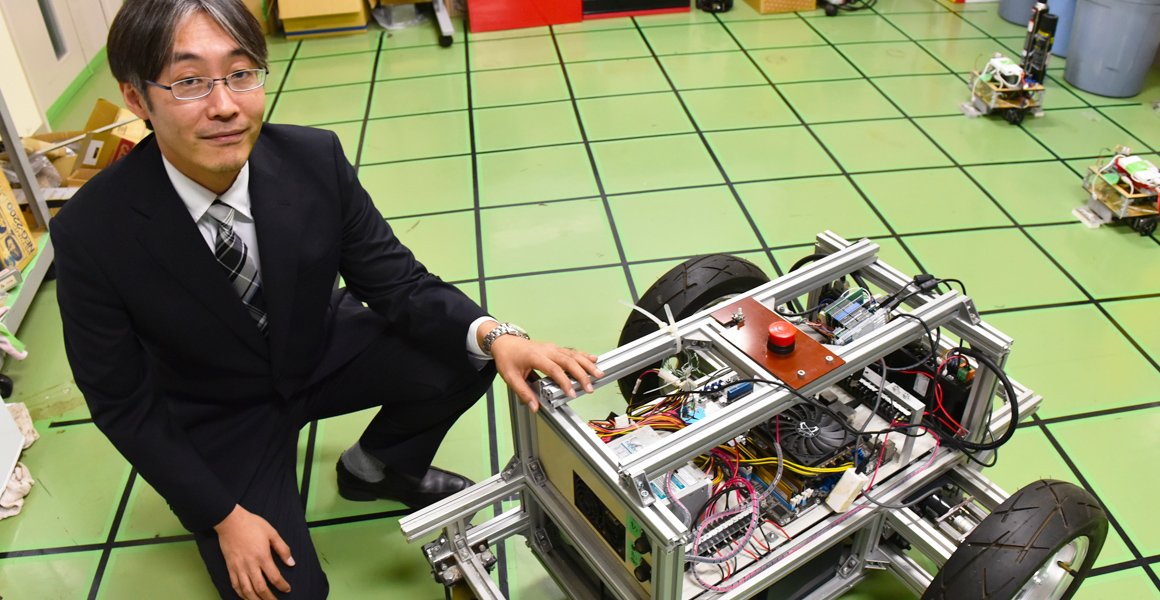
鹿内講師が手を置いているロボットは屋外走行を想定した大型ロボット
鹿内准教授の研究室には、大小の自走ロボットが並んでいます。ロボットといっても人間型ではなく、自律走行するタイヤ付きの機械です。約20cm四方の小型ロボットは、複数のロボットが走り回る状況を研究するためのロボット。一方、1m四方ほどの大型ロボットは、屋外での利用を想定したロボットです。このほか、搬送用途を想定した屋内向け中型ロボットもありました。研究室の床にはマス目のようにラインが描かれていて、ロボットを動かす実験スペースになっています。
現在、取り組んでいる研究について鹿内准教授に伺いました。例えば、レイアウト変更が行われたときにはどのような課題があるのでしょうか。
地図を作り直すといった程度のことであれば、前述したように2万円台のロボット掃除機でも対応できます。技術レベルでは、オープンソースソフトウェアとして公開されているROS(※2)を使って比較的簡単に2次元の地図が作れるのです。
※2 ROS:Robot Operating Systemの略。主にLinux系OSで動くミドルウェア。当初、学術研究を対象としていたが、産業用途でも利用が進んでいる
現在、取り組んでいる研究について鹿内准教授に伺いました。例えば、レイアウト変更が行われたときにはどのような課題があるのでしょうか。
地図を作り直すといった程度のことであれば、前述したように2万円台のロボット掃除機でも対応できます。技術レベルでは、オープンソースソフトウェアとして公開されているROS(※2)を使って比較的簡単に2次元の地図が作れるのです。
※2 ROS:Robot Operating Systemの略。主にLinux系OSで動くミドルウェア。当初、学術研究を対象としていたが、産業用途でも利用が進んでいる
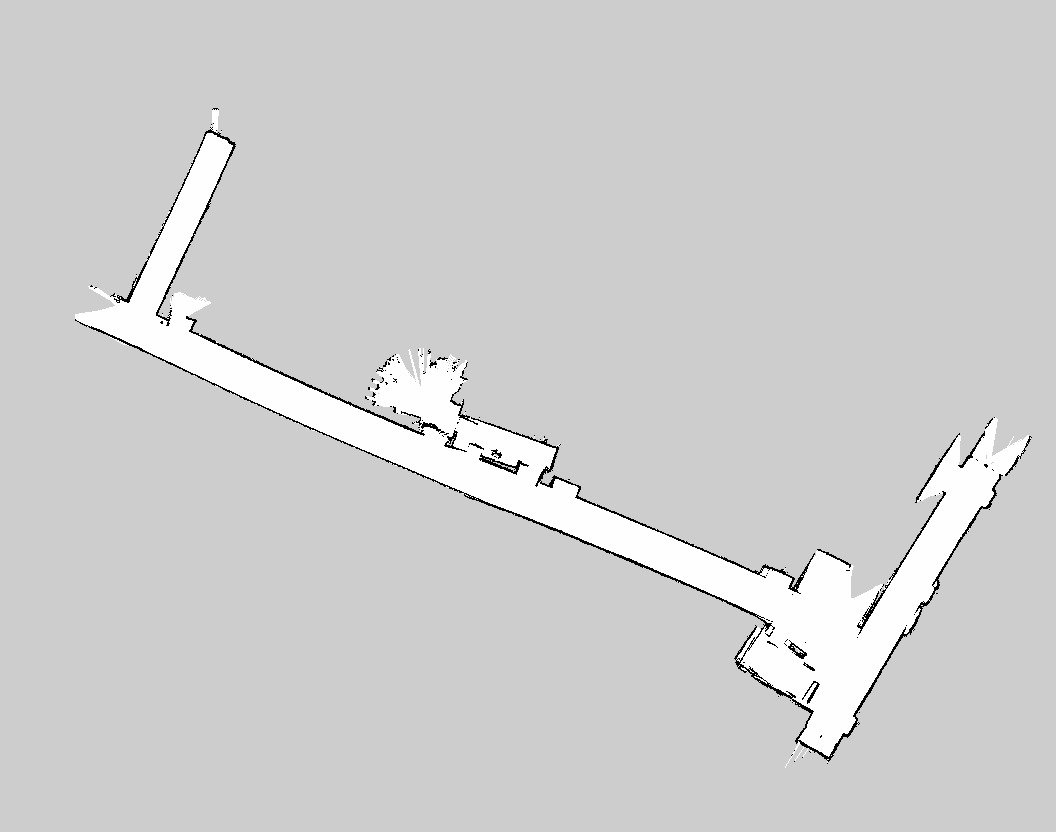
鹿内研究室のある建物内の地図
ロボットが廊下を走りながらレーザースキャナーで測域情報を得る。そのデータを使い2次元の地図を起こした。ROS のgmapping ライブラリ使用
しかし工場などの現場では、地図に現れない多くの制約があり、これらも変更されるといいます。「危険な領域や作業のための領域、人間の動線といった制約を考えると、自走ロボットに許される通路は、物理的に動ける領域よりさらに狭くなるのです」(鹿内准教授)。進入禁止エリアを設定できるロボット掃除機もありますが、現場では素早く、しかも間違いなく設定することが求められます。危険な領域への進入は許されませんから、位置精度も高くなくてはいけません。これに応えるにはセンサーを併用するなど、現場に合った複数の方法を考えておく必要があると言います。
複数台のロボットが走り回るときの課題はどうでしょう。衝突を避ける方法は大きく自律型と中央管理型の二つが考えられます。自律型は衝突回避を個々のロボットに任せます。一方、中央管理型はサーバーが衝突しないようロボットの動きを管理します。
鹿内准教授はどちらの方法にもメリットとデメリットがあると言います。
複数台のロボットが走り回るときの課題はどうでしょう。衝突を避ける方法は大きく自律型と中央管理型の二つが考えられます。自律型は衝突回避を個々のロボットに任せます。一方、中央管理型はサーバーが衝突しないようロボットの動きを管理します。
鹿内准教授はどちらの方法にもメリットとデメリットがあると言います。

「ロボットが危険を検知できる範囲には限界があります。また危険を検知した後、停止するまでの距離は短くしたいですが、そのためには走行速度に上限を設ける必要があります。このため自律型では、ロボットの動作や速度に大きな制約を設けなければいけません」。自動車に例えると、見通しが悪く信号機がない交差点では、北から南に直進するクルマも西から東へ直進するクルマも、一時停止しなくてはいけないケースがあります。同じように、ロボットも検知範囲が限られていて衝突の可能性のある場所では必ず一時停止しなくてはいけなくなるということでしょうか。確かに移動効率は悪くなります。
中央管理型ではこのような効率の悪さは避けられます。サーバーが信号機の役目を果たせばいいわけです。しかし一方で、突発的な状況が起きたときにすぐに対応できない点はデメリットだと言います。「サーバーが状況変化を検知したとしてもロボットに指示を出すまでに時間がかかり手遅れになることがあるのです」(鹿内准教授)。確かに前を行くロボットが荷物を落としたときに、自律型なら避けられるかもしれませんが、中央管理型では難しいかもしれません。
「ロボットの移動を研究する分野は、ロボットそのものを作るというよりも、ロボットを利用するためのアプリケーションを開発することに近いです。そこには機械系の技術に加えて、情報系や電気系の技術と知見が必要です。多様な技術を駆使して、それらをバランスよくチューニングすることで、スムーズなロボット移動が可能になると考えています」(鹿内准教授)。
自走ロボットの課題に向かって研究を進めている鹿内講師ですが、研究室の中だけで取り組んでいると、そこに危うさが潜んでいることがあると言います。例えば、研究室の環境に合わせて作り込んでしまい、現場で通用しなくなる危うさです。「通用する技術を目指すなら、現場に足を運び、地に足のついた開発を進めることが重要です」(鹿内准教授)。幸いなことに鹿内研究室には、企業から共同研究や連携の声が多くかけられています。研究における危うさを回避するプログラムも働いているようです。
中央管理型ではこのような効率の悪さは避けられます。サーバーが信号機の役目を果たせばいいわけです。しかし一方で、突発的な状況が起きたときにすぐに対応できない点はデメリットだと言います。「サーバーが状況変化を検知したとしてもロボットに指示を出すまでに時間がかかり手遅れになることがあるのです」(鹿内准教授)。確かに前を行くロボットが荷物を落としたときに、自律型なら避けられるかもしれませんが、中央管理型では難しいかもしれません。
「ロボットの移動を研究する分野は、ロボットそのものを作るというよりも、ロボットを利用するためのアプリケーションを開発することに近いです。そこには機械系の技術に加えて、情報系や電気系の技術と知見が必要です。多様な技術を駆使して、それらをバランスよくチューニングすることで、スムーズなロボット移動が可能になると考えています」(鹿内准教授)。
自走ロボットの課題に向かって研究を進めている鹿内講師ですが、研究室の中だけで取り組んでいると、そこに危うさが潜んでいることがあると言います。例えば、研究室の環境に合わせて作り込んでしまい、現場で通用しなくなる危うさです。「通用する技術を目指すなら、現場に足を運び、地に足のついた開発を進めることが重要です」(鹿内准教授)。幸いなことに鹿内研究室には、企業から共同研究や連携の声が多くかけられています。研究における危うさを回避するプログラムも働いているようです。
研究者プロフィール
鹿内佳人 准教授
理工学科 機械・自動車・航空・AIロボット系
2009年 宇都宮大学大学院 工学研究科 博士後期課程修了
2009年 宇都宮大学 地域共生研究開発センター 非常勤研究員
2010年 現職
理工学科 機械・自動車・航空・AIロボット系
2009年 宇都宮大学大学院 工学研究科 博士後期課程修了
2009年 宇都宮大学 地域共生研究開発センター 非常勤研究員
2010年 現職